
Kaasaegsetes sissepritse- ja diiselmootorites kasutatakse paljude anduritega juhtimissüsteeme, mis jälgivad kümneid parameetreid.Andurite hulgas on eriline koht faasianduril ehk nukkvõlli asendianduril.Lugege selle anduri funktsioonide, disaini ja töö kohta artiklist.
Mis on faasiandur
Faasiandur (DF) või nukkvõlli asendiandur (DPRV) on sissepritsega bensiini- ja diiselmootorite juhtimissüsteemi andur, mis jälgib gaasijaotusmehhanismi asendit.DF-i abil määrab mootori tsükli alguse selle esimene silinder (kui TDC saavutatakse) ja rakendatakse faasiline sissepritsesüsteem.See andur on funktsionaalselt ühendatud väntvõlli asendianduriga (DPKV) – elektrooniline mootorijuhtimissüsteem kasutab mõlema anduri näitu ning genereerib selle põhjal igas silindris kütuse sissepritse ja süüteimpulsse.
DF-e kasutatakse ainult hajutatud faasisissepritsega bensiinimootoritel ja teatud tüüpi diiselmootoritel.Ja just tänu andurile on kõige lihtsam rakendada faasisissepritse põhimõtet, st iga silindri kütuse sissepritse ja süüde, sõltuvalt mootori töörežiimist.Karburaatormootorites pole DF-i vaja, kuna kütuse-õhu segu juhitakse silindritesse ühise kollektori kaudu ja süüdet juhitakse jaoturi või väntvõlli asendianduri abil.
DF-i kasutatakse ka muudetava klapiajastussüsteemiga mootorites.Sel juhul kasutatakse sisselaske- ja väljalaskeventiile juhtivate nukkvõllide jaoks eraldi andureid, aga ka keerukamaid juhtimissüsteeme ja nende tööalgoritme.
Faasiandurite projekteerimine
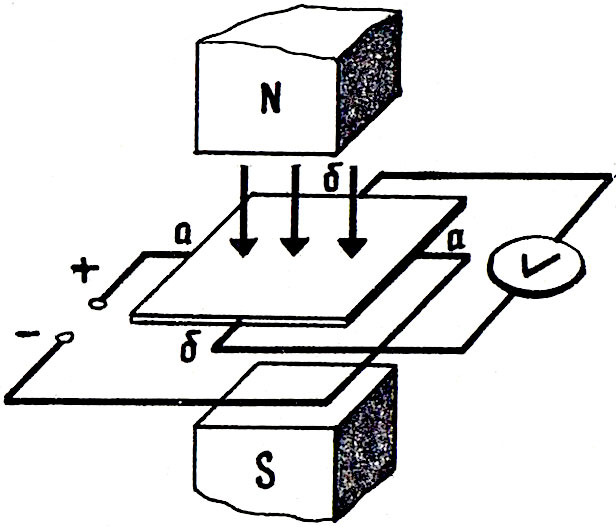
Praegu kasutatakse Halli efektil põhinevat DF-i - potentsiaalide erinevuse tekkimist pooljuhtplaadis, millest läbib alalisvool, kui see asetatakse magnetvälja.Halli efekti andurid on rakendatud üsna lihtsalt.See põhineb ruudu- või ristkülikukujulisel pooljuhtplaadil, mille neljale küljele on ühendatud kontaktid - kaks sisendit alalisvoolu varustamiseks ja kaks väljundit signaali eemaldamiseks.Mugavuse huvides on see disain valmistatud kiibi kujul, mis paigaldatakse anduri korpusesse koos magneti ja muude osadega.
Faasiandureid on kahte tüüpi:
-piludega;
- Lõpp (varras).

Piluandur

Lõpuandur
Piluga faasiandur on U-kujuline, selle sektsioonis on nukkvõlli võrdluspunkt (marker).Anduri korpus on jagatud kaheks pooleks, ühes on püsimagnet, teises on tundlik element, mõlemas osas on erikujulised magnetsüdamikud, mis tagavad magnetvälja muutuse töötamise ajal. võrdlusaluse läbimine.
Otsaandur on silindrilise kujuga, nukkvõlli võrdluspunkt läheb selle otsa ette.Selles anduris asub sensorelement otsas, selle kohal püsimagnet ja magnetsüdamikud.
Siinkohal tuleb märkida, et nukkvõlli asendiandur on integreeritud, see tähendab, et see ühendab ülalkirjeldatud signaalianduri elemendi ja sekundaarse signaalimuunduri, mis võimendab signaali ja muudab selle elektroonilise juhtimissüsteemiga töötlemiseks mugavaks vormiks.Andur on tavaliselt ehitatud otse andurisse, mis lihtsustab oluliselt kogu süsteemi paigaldamist ja seadistamist.
Faasianduri tööpõhimõte
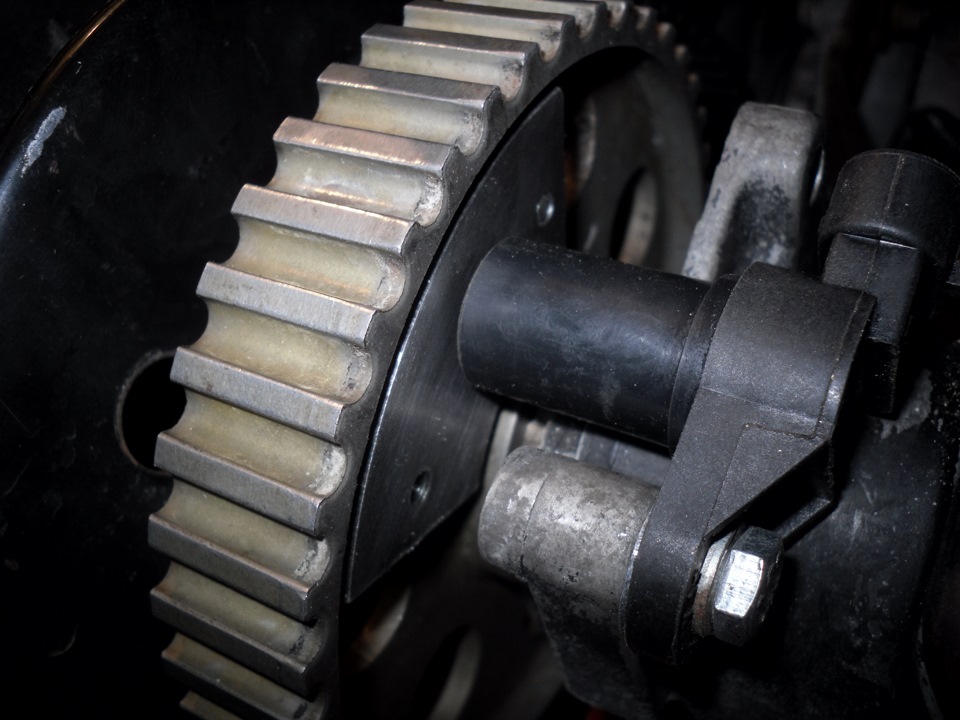
Faasiandur on ühendatud nukkvõllile paigaldatud põhikettaga.Sellel kettal on ühe või teise konstruktsiooniga võrdluspunkt, mis mootori töötamise ajal läbib anduri eest või selle pilus.Anduri eest möödudes sulgeb võrdluspunkt sellest väljuvad magnetjooned, mis toob kaasa tundlikku elementi ületava magnetvälja muutumise.Selle tulemusena genereeritakse Halli anduris elektriimpulss, mida muundur võimendab ja muudab ning suunatakse mootori elektroonilisse juhtseadmesse.
Pilu- ja otsaandurite jaoks kasutatakse erineva disainiga põhikettaid.Paarituna piluanduritega töötab õhuvahega ketas - selle vahe läbimisel tekib kontrollimpulss.Lõppanduriga paaris töötab hammastega ketas või lühikesed etalonid – kontrollimpulss tekib siis, kui etalon läbib.
Faasiandur on ühendatud nukkvõllile paigaldatud põhikettaga.Sellel kettal on ühe või teise konstruktsiooniga võrdluspunkt, mis mootori töötamise ajal läbib anduri eest või selle pilus.Anduri eest möödudes sulgeb võrdluspunkt sellest väljuvad magnetjooned, mis toob kaasa tundlikku elementi ületava magnetvälja muutumise.Selle tulemusena genereeritakse Halli anduris elektriimpulss, mida muundur võimendab ja muudab ning suunatakse mootori elektroonilisse juhtseadmesse.
Pilu- ja otsaandurite jaoks kasutatakse erineva disainiga põhikettaid.Paarituna piluanduritega töötab õhuvahega ketas - selle vahe läbimisel tekib kontrollimpulss.Lõppanduriga paaris töötab hammastega ketas või lühikesed etalonid – kontrollimpulss tekib siis, kui etalon läbib.
Postitusaeg: 24. august 2023